
机械系-精密装备与机器人技术团队-郭丽峰
精密装备与机器人技术团队介绍
团队名称
精密装备与机器人技术团队
团队简介
精密装备与机器人技术团队成立于2012年,主要从事机器人技术与应用、智能装备数字化设计与制造、精密测量与仪器智能化等方向科研工作。团队先后完成北京市属高校创新能力提升计划项目、北京市青年拔尖人才项目、北京市组织部项目,以及企业委托等项目20余项,发表论文30余篇,获专利10余项,培养硕士研究生16人,本科毕业生120余名,研究成果得到产业化应用推广、填补了国内空白。团队教师指导学生参加“互联网+”、“挑战杯”、“全国机器人锦标赛”等科技竞赛并获奖。
团队与清华大学机器人与自动化技术及装备研究室、天津大学精密测试技术及仪器国家重点实验室、中国康复研究中心、北京理工大学光机电微纳制造团队、北京永新医疗设备有限公司、北京鸿鹄敏行科技发展有限公司、北京恒正精机科技有限责任公司、北京微度科技发展有限公司等有着密切交流合作和人才联合培养机制。
典型工作介绍如下:
(1) 大型医学影像设备SPECT机电系统研制
在大型医学影像设备SPECT机电系统研发相关课题中,基于CAD/CAE、虚拟样机技术完成了设备机电系统建模与优化设计;研制了基于Ethernet和CAN总线的分布式多轴运动控制,实现了人体轮廓自动跟踪功能;提出将几何标定与系统综合指标标定相结合的方法,实现设备标定与误差补偿。


图1 国内首台可变角双探头临床通用型SPECT
在国内率先完成了大型医学影像设备SPECT机械及运动控制系统研发工作,参与完成的国产首台可变角临床通用型SPECT经国家食品药品监督管理总局审批通过(国械注准20173330681),获准上市。该设备入围工信部《首台(套)重大技术装备推广应用指导目录(2019版)》(编号:13.10.8),对推动SPECT在我国实现精准医疗和大型核医学设备的国产化具有重要意义。
(2) 低温共烧陶瓷(LTCC)产线热切机研制
LTCC(Low-temperature co-fired ceramics, 低温共烧陶瓷)技术可实现高集成度、高性能的多层芯片模块化设计电子封装,广泛用于高精度片式元件、无源集成功能器件、无源集成基板、功能模块等集成器件制备。目前我国的LTCC生产工艺线基本依赖进口,使得相关产业发展受到限制。突破LTCC工艺实现的关键技术、研发自主LTCC产线装备成为我国集成器件技术发展的迫切需求。
团队在国内率先研发了可应用于LTCC自动化产线的全自动热切机,实现了裁切、撕膜工艺流程的全自动化。提出了双目视觉与伺服运动相结合的智能在线标定技术,实现相机坐标系、工件坐标系、刀具位置的一键在线自动标定,裁切精度达到10 μm。完成3台全自动热切机研制,已装备于LTCC自动化产线。
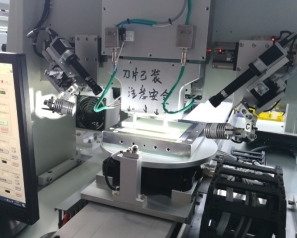
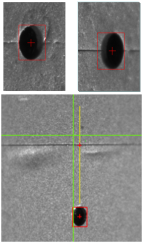
图2 基于双相机视觉位置校正的LTCC热切机 图3 标志孔定位裁切
(3) 高精度光纤陀螺阈值测试技术
参考级光纤陀螺在战略导弹、卫星、潜艇、航母等的高精度、长航时惯性导航系统中担当重要角色,应用需求迫切。角定位精度测定是高精度光纤陀螺研制过程中的关键环节,目前国内没有完全满足参考级光纤陀螺角定位测定需求的产品,国外相关设备处于对华禁售状态。项目团队综合采用高精密气浮轴系、基于力控的角度粗调与基于摩擦环的角度微调机构方案,研制成功适用于参考级光纤陀螺测试用的高精度角定位装置。经中国计量院检定,设备角定位分辨力0.1角秒,角度定位精度0.2角秒,测角重复性0.06角秒,达到国内领先水平。
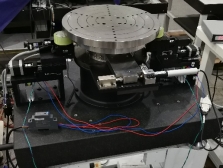

图4 高精密转台 图5 中国计量院检定结果
(4) 轮腿式移动机器人技术
在移动机器人相关课题研究中,提出了一种新型的轮腿式变结构移动机器人。将四足哺乳动物腿式运动方式与轮式机构相结合,实现了轮式、腿式、轮腿结合等多种运动模式;基于分布式多智能体(Agent)与中枢模式发生器(CPG)实现轮腿式移动机器人姿态规划与运动控制;基于多传感器信息融合与模糊控制技术实现一定机器人的自主避障与导航。
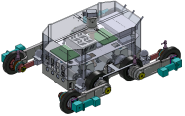


图6 轮腿式移动机器人
(5) 加工机器人技术
在加工机器人相关课题研究中,研制了基于工业机器人的7轴柔性加工系统。基于该平台,进一步开展了基于CAD-CAM-Robot数据链的机器人柔性加工自动化、智能化技术研究。相关技术可应用于中大型、复杂三维曲面的加工制造,如大型叶片模具加工,假肢接受腔模具制作等。
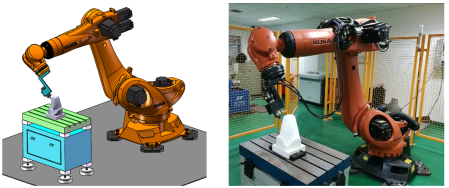
图7 基于工业机器人的假肢接受腔阳模加工技术研究
(6) 学科竞赛获奖
团队指导学生在各类学科竞赛中获奖,荣获“亿丰升华杯”第十五届全国机器人锦标赛暨第四届国际仿人机器人奥林匹克大赛 半自主型11vs11机器人足球项目二等奖、半自主型5vs5机器人足球项目二等奖、仿真型11vs11机器人足球项目三等奖, “挑战杯”首都大学生课外学术科技作品竞赛三等奖,第三届中国“互联网+”大学生创新创业大赛(北京赛区)二等奖, 第五届中国“互联网+”大学生创新创业大赛(北京赛区)二等奖,第七届中国“互联网+”大学生创新创业大赛北京赛区一等奖、国赛铜奖。

图8 基于工业机器人的假肢接受腔阳模加工技术研究
团队成员
郭丽峰,林顺英
成员简介
另附文件